





Innova Lunabotics: INNEX-1 Lunar Rover
About Us
Innova Lunabotics is a student engineering team based at the University of Leicester. Founded in 2021, our team of over 100 members is divided across Electronic, Software, and Mechanical disciplines. We are united by a single mission to design and manufacture advanced robotic systems for space exploration and extreme environments, while keeping Innova’s sustainability mission at the core.
About Our Project
Our current project is INNEX-1, a 45 kg semi-autonomous lunar rover designed to navigate in a lunar simulated environment to excavate, and transport lunar simulant. INNEX-1 relies on an advanced software architecture, utilizing ROS 2 and the Nav2 stack running on an NVIDIA Jetson Orin Nano edge-computing module. Through this project, students gain hands-on experience in real-world engineering challenges such as electric powertrain integration, battery management, circuit designing and electrical safety systems.
To navigate and drive in the lunar simulant, the rover utilizes a heavy-duty drivetrain consisting of four Gimson GR-WM4-V4 motors, linear actuators for deposition, moving the conveyor belt, and a BLDC-driven bucket excavator. Controlling these mechanical loads while simultaneously processing AI data requires a robust electrical architecture.
About Our Circuit Board: The INNEX-1 Jetson HAT
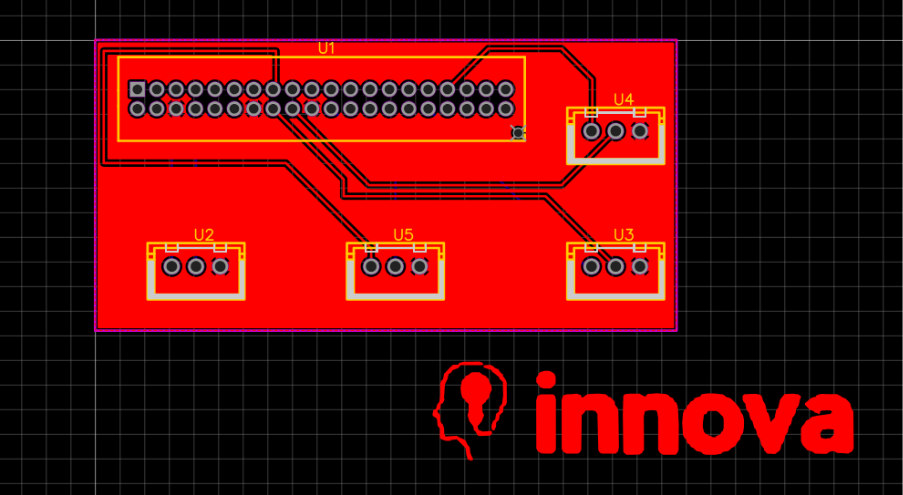
In high-vibration environments like a lunar simulant arena, standard jumper wires and breadboards are a critical point of failure. To aid the communication between our Jetson Orin Nano and our high-current motor controllers, we have designed the INNEX-1 Jetson HAT, a custom 60x50mm, 2-layer printed circuit board.
This custom shield mounts directly onto the Jetson’s 40-pin header and routes 3.3V logic signals to secure JST-XH connectors.
This features dedicated traces linking the Jetson's PWM pins to our two Cytron MD10C controllers (for the linear actuators) and our ZS-X11D1 BLDC controller (for the excavator motor), ensuring smooth movement without the usage of software PWM.
UART communication for serial transmission lines connecting the Jetson to two Sabertooth 2x32 motor controllers operating in Packet Serial mode for the drivetrain.
Also, four dedicated 4-pin ports to capture raw quadrature encoder ticks from the wheel motors, feeding them directly into the Jetson’s GPIO pins for precise wheel distance measurment.
A full-board solid copper ground pour connecting all logic grounds directly to the Jetson, preventing electromagnetic interference generated by our 22.2V drive motors from corrupting our navigational telemetry.
The Integrated Motherboard Architecture
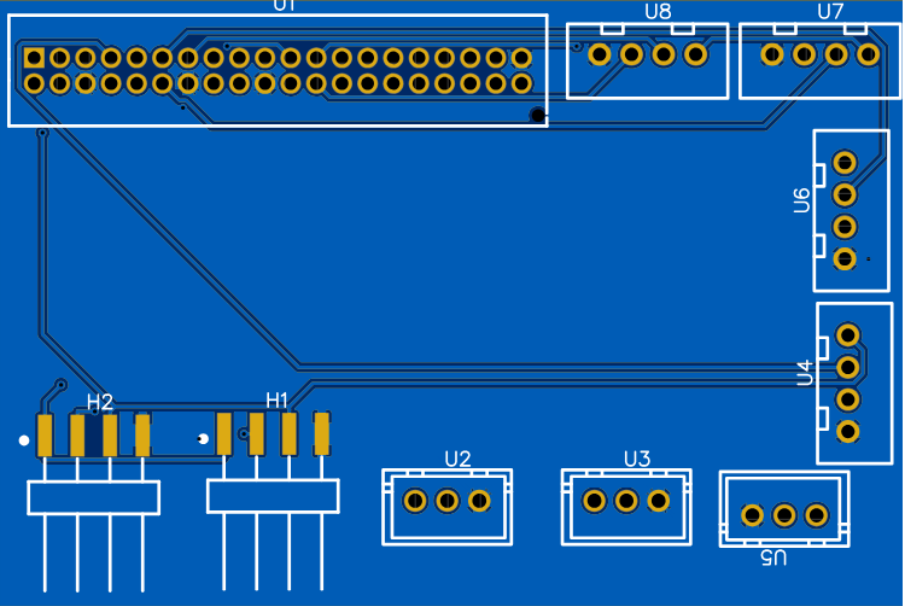
One idea for our Phase 2 electrical architecture will eliminate the intermediate wire harness. We are currently conceptualizing a large-scale Integrated Carrier Motherboard.
Instead of routing wires between separate modules, the NVIDIA Jetson Orin Nano, the Sabertooth 2x32 drivetrain controllers, the BLDC motor controller, and the actuation drivers will all connected directly onto this PCB backplane. This motherboard will feature heavy-copper power planes to safely distribute current loads alongside the impedance-matched logic traces for the edge-computing data streams. Below is a first draft for this motherboard where the jetson is represented by the pin headers and the other components are the motor controllers and encoders.
Why We Need Wpsload
The custom PCBs are the central part of our rover. For our Phase 1 Logic HAT, we require the professional manufacturing, durable solder mask, and high-quality FR4 fiberglass that Wpsload provides to ensure our logic signals remain constant under extreme physical stress. Looking ahead to our Phase 2 Motherboard, we know we will need a manufacturer capable of producing heavy-copper, multi-layer boards that can handle the power distribution.
Partnering with Wpsload will give our software team a perfectly stable platform to push the boundaries of AI-powered space navigation. We would be incredibly proud to feature the Wpsload logo on the chassis of INNEX-1 as we bring this rover to its final stage.
- Comments(0)
- Likes(1)












